



电话:0512-50369657
传真:0512-57566118
邮箱:zeiss.sale@yosoar.com
昆山市春晖路嘉裕广场1幢1001室
12月我们一起来看看三坐标测量实操
来源:发布时间:2021-12-01 11:56:55点击率:
空间坐标点的采集是三坐标测量的基础。任何形状都是由空间点组成,所有的几何量测量都可以归结为空间点的测量。

坐标点拟合。坐标点数据需要经过计算机处理,拟合形成测量元素,比如直线、平面、园、圆柱、圆锥等等,再经过特定的数学计算方法得
出其形状位罢八兰以及其他 n向量数据
上图来自网络
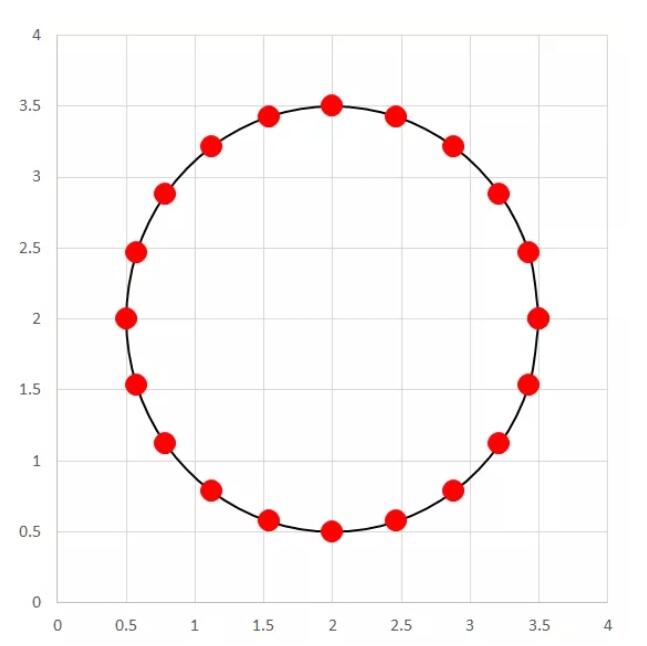
同样,由于机床本身的误差外加装夹误差、加工 热误差、振动误差等原因。 被加工圆实际上也不是理想圆,只是因为误差本身数
眼难以分辨。为了能让大家形象的观察到误差的存在,我们把刚才被测圆数据的误差放大几百倍,看似完美的圆就变成了下面的不规
(实测圆) :
此时,我们不难看出,这些实测坐标点似乎不像一一个圆。 但是,汉的的确确是一个实际圆棒 上的坐标值。问题来了:
它的直径是多少??? .
它的圆心又在哪里???
那么,此时此刻我们需要找一个理想的圆来表示出这 个实际上并不理想的圆,这个过程就是前面提到的坐标点拟合。接下来就是
首先,我们的任务是要找到一个理想圆来表示实际上有缺陷的圆。那么,找圆的方法有很多,比如可以这样找:
这个误差就是概率论与数理统计里面讲到的残余误差:
残余误差
Vi=li-Vi
其中v表示残余误差,表示实测点, y表示理想点。*理想的拟合圆应该能够使所有测点残余误差平方和为*小,因此应该满足如下
2
V
+D
3+v3 +.
......
+V1
最小
三坐标测量机君了解到这个就是所谓的*小二乘法。
通过上面的这个案例我们可以发现配备一台三坐标测量机不仅能够提升效率还能光学产品制造商30%废品率,其次还有你怎么利用蔡司三坐标测量机来助你解决棘手的相关问题也是需要考虑的。
